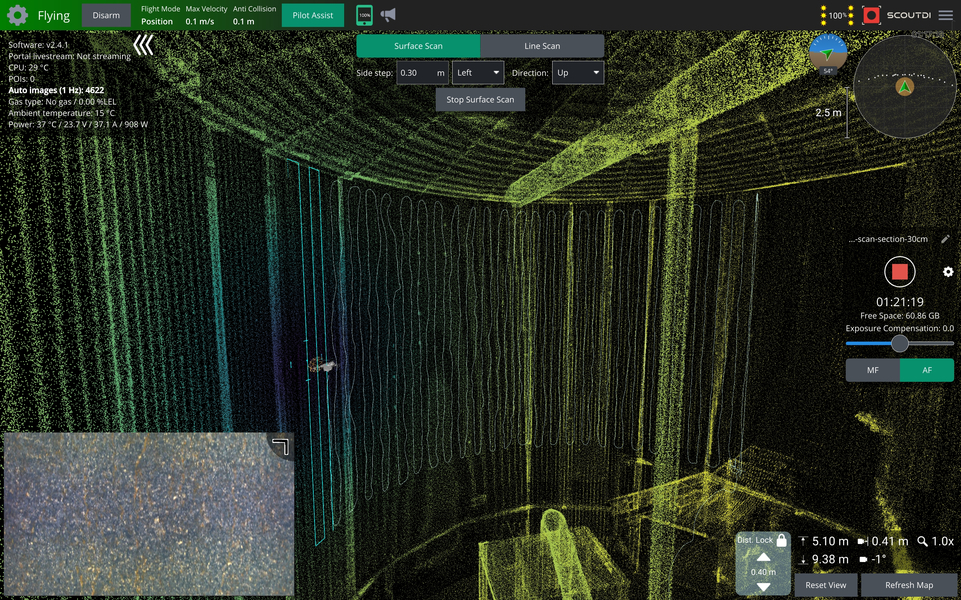
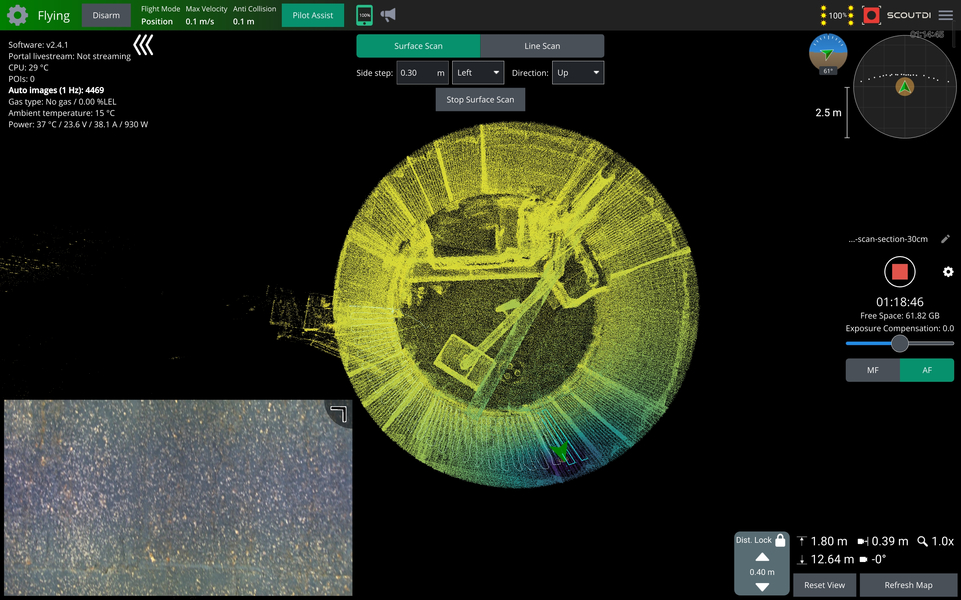
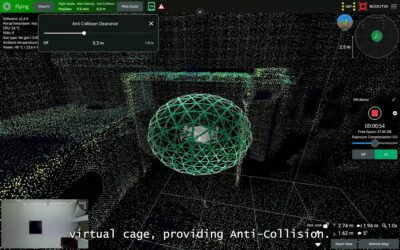
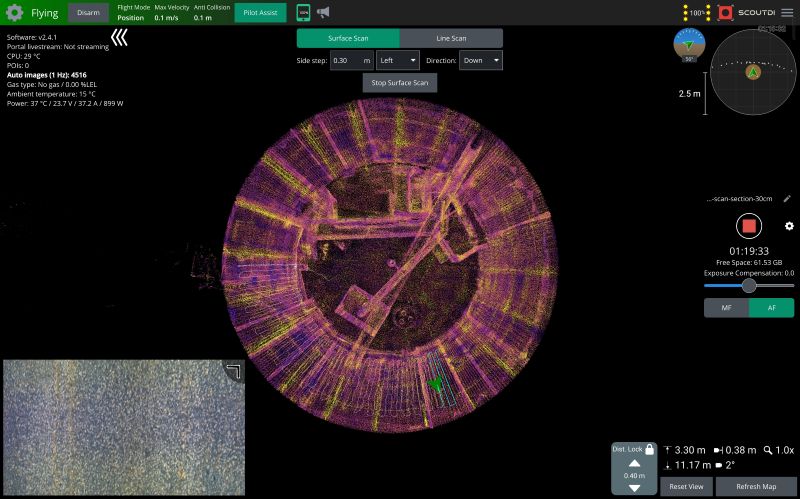
One hour and nineteen minutes into an inspection, the counter read 4,516 images. On screen, a rotated point cloud showed the tank from above: roughly two-thirds of the sector already scanned, a light blue path tracing what was left. Nothing here was a replay or post-processing, this was the live interface an operator watches throughout an Automatic Surface Scan, running on a Scout 137 inside a tank at RelyOn NUTEC’s facility in Trondheim, Norway.
Automatic Surface Scan
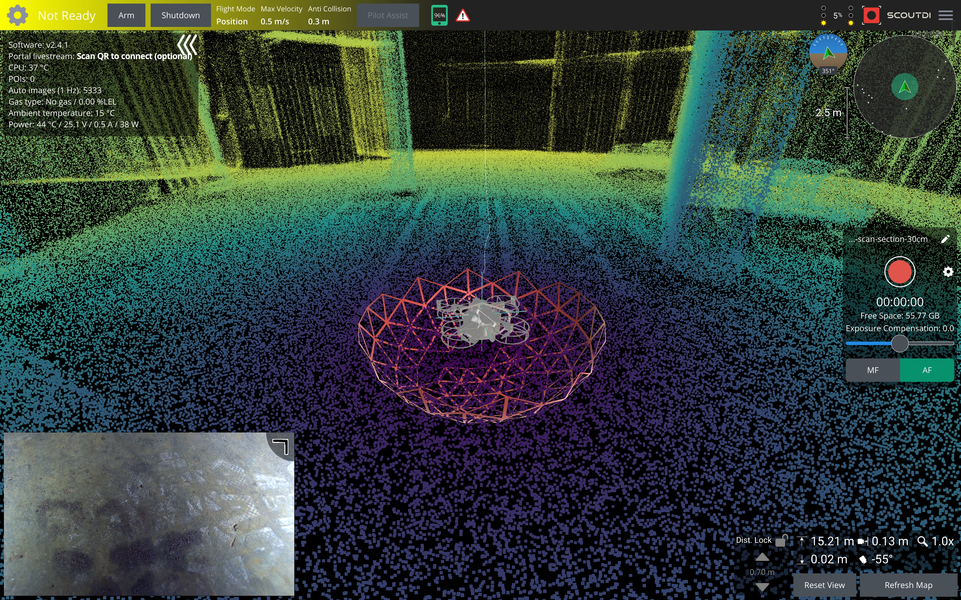
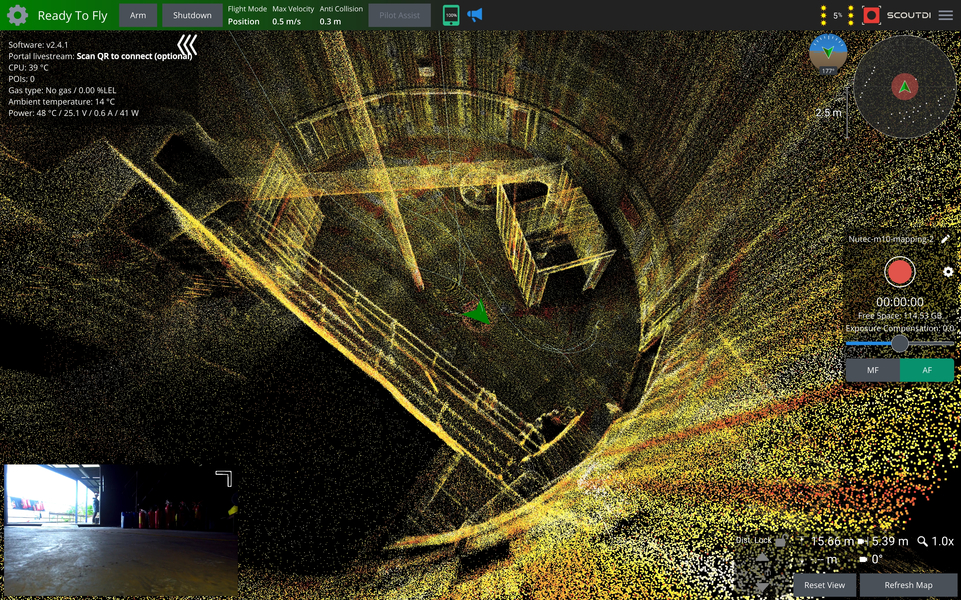
Automatic Surface Scan has been part of the Scout 137 since last year, and by now it’s part of how tank inspections get flown by ScoutDI customers. What’s captured here in this timelapse is what that looks like from the inside: the point cloud filling in, sector by sector, exactly as the pilot sees it. Sequences from the Scout Portal are also used.
Easy setup
Setting up an Automatic Surface Scan takes about a minute. The operator defines a top point and a bottom point on the wall, along with the side step; the horizontal distance the drone moves between each vertical pass. In this run, the scan covered roughly 12 metres vertically with a 30 cm side step. From there, Distance Lock takes over, holding a constant stand-off distance to the wall as the drone follows the tank’s curvature, so the operator doesn’t need to correct position manually pass after pass. The same distance-holding works whether the surface is dead vertical, curved, or sloped like the inside of a chute or hopper, which is what makes it useful across a wide range of industrial assets, not just cylindrical tanks.
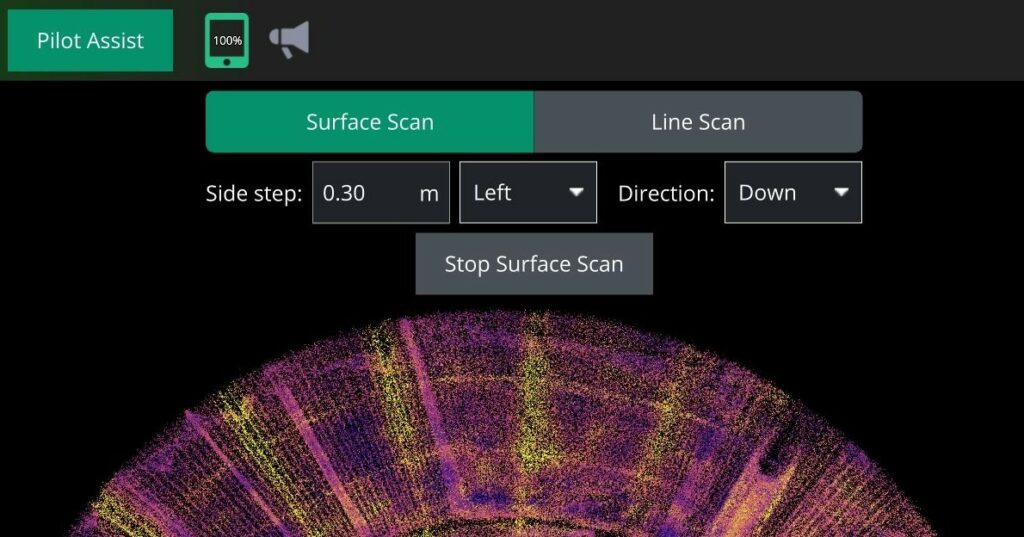
What’s left for the pilot to do is mostly supervision: keeping an eye on coverage, image count, elapsed inspection time, and the drone’s position, all updated in real time on the same screen. It’s a different kind of workload than manual piloting, less about constant control input, more about monitoring that the system is doing what it should.
Why it matters
That shift matters beyond convenience. A flight pattern that’s planned once and executed the same way every time is repeatable by design, which is part of what tank and asset inspections need for meaningful trending over time. That kind of repeatability and data consistency is also what opens the door to automated analysis and predictive maintenance further down the line, since results only become comparable, flight after flight, if they were captured the same way each time. Watching that coverage build up on screen, sector by sector, is a simple way to see that logic play out in real time.
The footage from this flight, captured through the Scout Operator interface and reviewed afterwards in Scout Portal, has been put together as a timelapse: sectors filling in on the point cloud, image count climbing, and the scan path updating live from start to finish. A closer look at the data behind that scan, including how it compares against a handheld reference scan taken the same day, will follow as a separate piece once that material has been processed.
The takeaway
For inspection teams, the practical takeaway is straightforward: autonomy features like Automatic Surface Scan are meant to make coverage more consistent and free up attention during the flight, not to remove oversight from the process. The pilot is still watching. There’s just less for them to actively do. less stress and less fatigue.
In the case with the Storfinnforsen Hydropower Dam, this factor gave the pilot 50% more coverage per day and saved over 40 days of inspection just for that part of the job. Yet another benefit to consider.